月球漫步

已累计飞行 34556 米
关于无人机坠机的分析
此次的无人机坠机让我意识到了很多的问题。首先第一点,我在对无人机更新的过程中,没有时刻关注更新情况,导致系统固件是否更新完成都不清楚,可能就是因为固件更新不完全的原因,导致了坠机。
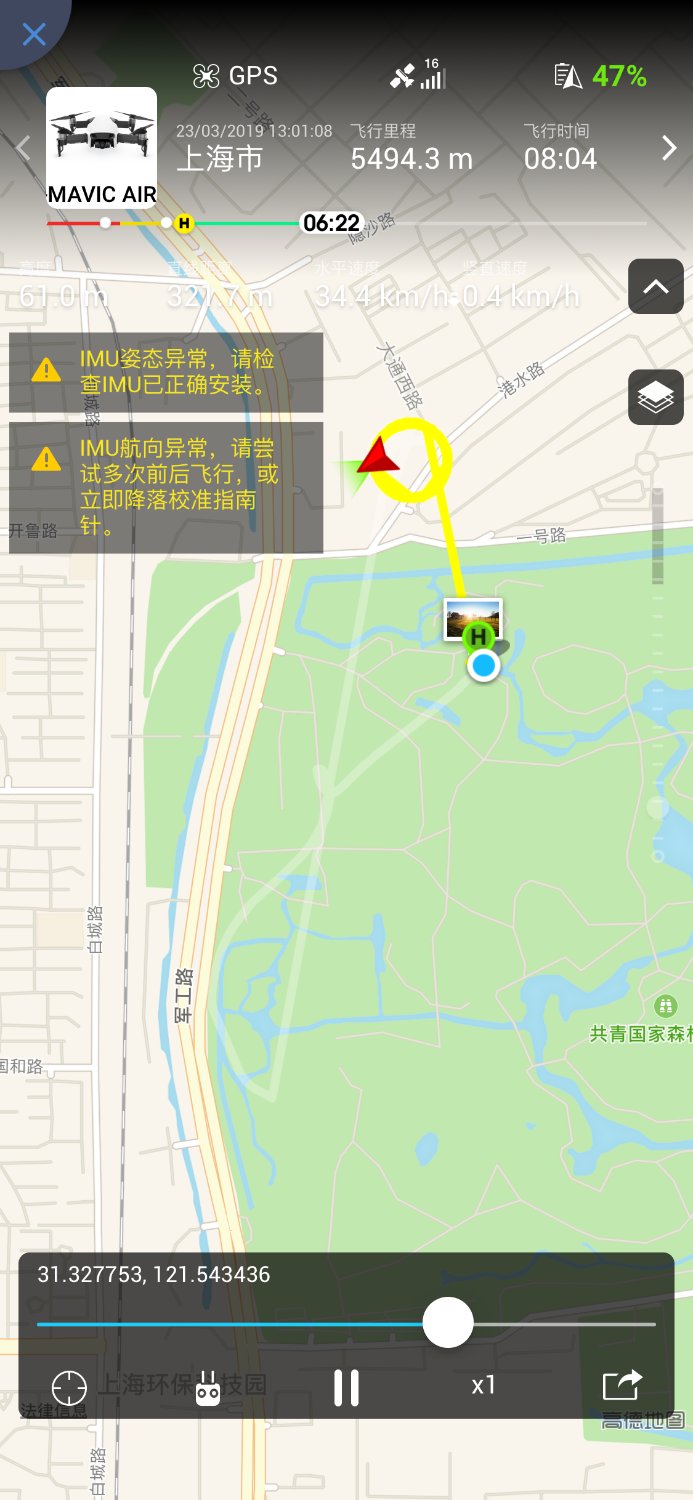
第二点,在无人机起飞前的准备工作不足,指南针,IMU姿态等硬件系统在远距离运输后,应该进行仔细的核对,如有文同应当及时调试。还有在起飞前我没有查看当地的信号强度,是否适合飞行。也并未仔细查看是否设置了返航点。
第三点,在飞行过程中发现了GPS信号强度弱的提示,应当及时选择返航,而我错误的选择了让飞机继续飞行,并认为可以重新控制住飞机,结果之后GPS信号完全丢失,飞机变成姿态模式。最不愿意看到的情况发生了,接着便是IMU失灵,最终导致飞机完全失控。幸亏飞机有低电量返航这个模式,不然飞机可能在一公里外的地点坠机,从而让搜寻变得更加困难。
最后,当飞机在返航途中时,我错误的切换了信号,从自动选择信号源,切换成了自定义,这实在是不应该,浪费了宝贵的时间。
最后的最后,在飞机已经在能够目视观测到的情况下,我选择继续让飞机自动返航,而不是切换手动操作,当时的飞机信号仍然不稳定,显然这是一个错误的决定。如果我能切换为手动模式,并迅速到达飞机附近,进行手动调整,可能最后也不会坠机。
总结,这次是一次意外和人为元素都有的事故。由于我没有经验,在第一时间选择了让飞机继续飞行而不是返航,导致飞机在电力不足的情况下自动返航,从而造成最后到达返航点时只有一分多钟的时间让我补救,这是点时间对于一个新手来说,实在太少太少。在能够目视的情况下,没有第一时间赶到现场来操纵飞机,而是害怕飞机会失控砸到人,或是此时脑子已经一片空白,根本不知道如何应对,只能任由飞机自动返航。
这次的教训很深刻,让我意识到了飞无人机,不仅仅是在玩,更是要对飞机,对地上的第三方人员,同时也是对自己负责。在问题发生时,应当冷静的思考下一步的行动,在仍旧无法控制飞机的情况下,应当选择返航,而不是盲目自信的去坚持错误的做法。
以上只是作为新人的一些经验,希望各位新人飞友,在遇到同样情况时,不要重蹈我的覆辙。


航拍无人机
DJI Air
发布于2019-03-26
浏览1.0k
1
1
10
10 条评论
最热
最新
最早
说说你的想法,让评论更有深度~
暂无更多评论