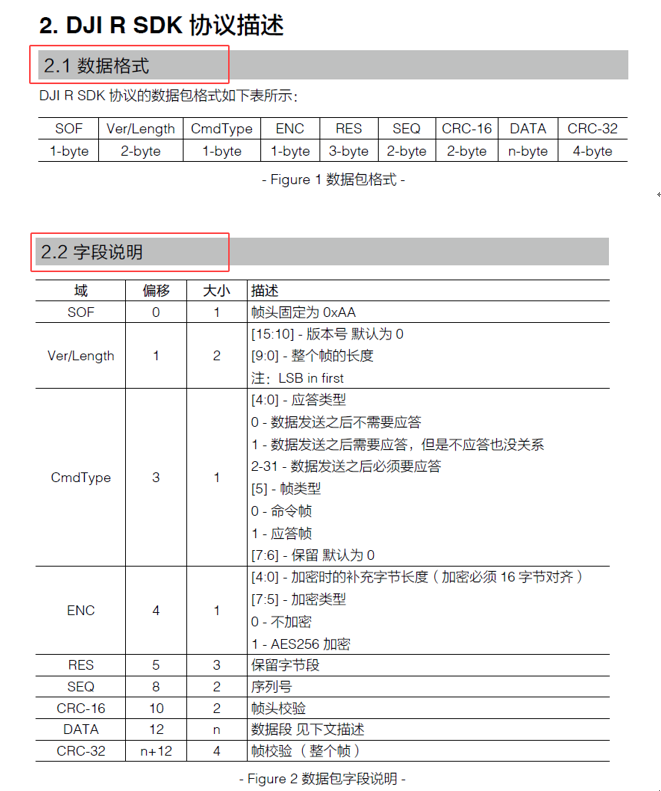
兰心超级版主10-31 08:26 楼主您好,烦请参考下图所示。 [图片]
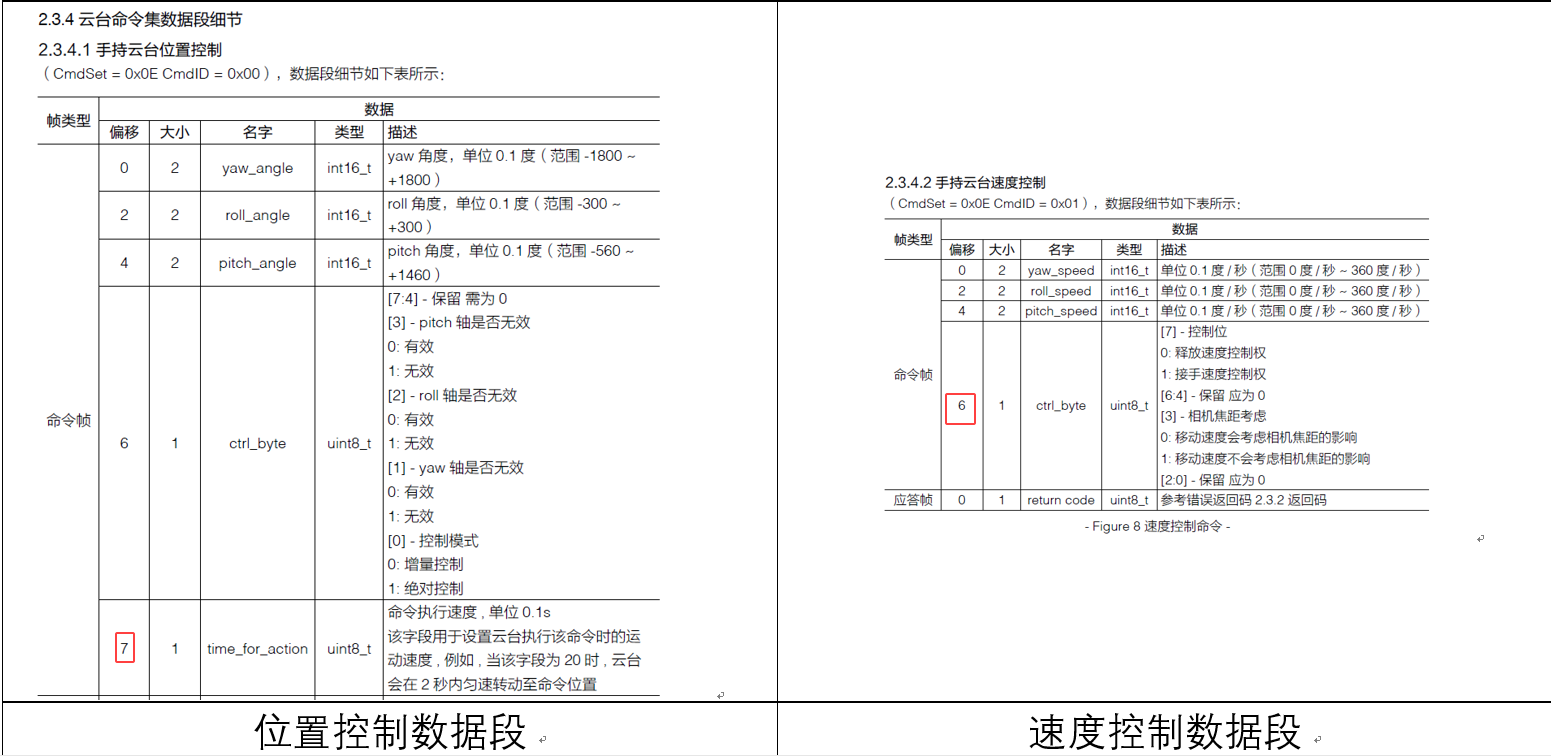
绸凉左尘埃11-13 21:11 [图片]速度控制SDK是这样的,如何控制是向左转还是向右转呢
兰心超级版主11-13 22:02 给【int16_t】负值就可以。举例:3600 是360°/s ,给值-3600 就是-360°/s,左右就是反向。
绸凉左尘埃11-14 14:27 还有就是运动到指定角度的时候有速度限制,我目前测试是0.5s最快了,能否更改设置使速度更快呢?或者都是恒定速度到达目的地







 22
22 401
401

 速度控制SDK是这样的,如何控制是向左转还是向右转呢
速度控制SDK是这样的,如何控制是向左转还是向右转呢


 收藏
收藏 点赞
点赞 评论
评论 分享至:
分享至:




