OsitaLV


已累计飞行 5449016 米
“姿态模式!”
当你飞飞机的时候,突然听见遥控器传来这个声音,你会不会心里一颤,不知所措?
许多新手谈“姿态模式”色变,那姿态模式到底是干什么用的,这得从多旋翼无人机的自动悬停机制说起。

一个完整的可在各种环境下稳定悬停的无人机,安装了GNSS、IMU、指南针、气压计和辅助定位系统。
GNSS通过卫星定位系统提供了最基础的位置信息,让飞机知道自己在哪,民用GNSS的定位精度通常在1到5米之间。
IMU包含三轴陀螺仪和三轴加速度计,让飞控能感知到飞机的空间姿态变化和速度变化,可让飞机保持平衡,不至于自己翻跟头。飞机能锁住机头方向不会自己乱动,也是靠IMU实现。但IMU只能提供航向和姿态变化量,只有航向发生变化时IMU的陀螺仪才会有读数,在静止时读数为0。因此在消费级无人机上,IMU不提供绝对航向信息。
指南针为飞控提供绝对航向信息,由于GNSS提供的位置信息是基于地面的直角坐标系,飞控不能直接根据其偏移量判断应该朝哪个方向调整动力输出以修正自己的位置,IMU虽然也提供航向信息但容易产生累积误差,于是飞控需要指南针将GNSS的直角坐标系转换为基于机头方向的极坐标,将“东西南北”变成“前后左右”,飞控按转换好的方向直接倾斜机体抵消漂移才能防止飞机自己飘走。有些飞手错误地认为只有指南针才能让飞机锁住机头方向,实际上飞机只有在需要实现自主定位悬停和巡航才需要用到指南针,不使用自主定位悬停时,指南针拔掉都可以。只是某些飞控厂家会故意在飞控代码中强制要求指南针必须连接正常才能通过自检。
气压计利用低处气压大,高处气压小的原理提供了高度信息,它的灵敏度比较高,几厘米的高度变化都能让气压计读数产生明显的变化,飞控主要依靠它实现自动定高悬停。但其容易受气流影响产生较大误差,飞控通常会结合气压计、GNSS和辅助定位系统提供的高度信息一起控制飞机的高度。
辅助定位系统包括但不限于视觉里程计、红外和超声测距仪、激光雷达、定位基站等,在卫星定位信号弱甚至完全没有卫星定位的复杂环境下帮助飞机确定自己的位置和高度,实现定点定高悬停。在消费级无人机身上,最常用的就是视觉里程计,它包含了下视视觉定位和视觉避障两大部分。无人机的视觉定位不仅仅由下视视觉提供位置信息,水平和上视避障也在提供位置,提高低空悬停的精度。配备双目视觉的传感器不仅能帮助定位,还能提供方向信息,作为视觉航向计部分代替指南针的功能。
无人机为什么能自己在天上纹丝不动稳如钉子般悬停,是因为飞控动态融合了GNSS、IMU、指南针、气压计和辅助定位系统的数据,进行每秒数百次的姿态修正来抵消机身的漂移,你在地面上看到的每一个仪表数据,都是各传感器数据融合后的结果。
如果飞控无法获取GNSS和辅助定位的数据,自然无法修正位置,就会将姿态修正的目标从保持定位、地速为0改成保持姿态完全水平,并设定一个姿态角限位防止用户持续打杆将飞机搞翻车。此时,用户的打杆操作将全权控制飞机的姿态角,不打杆则姿态角为0,飞机保持水平。保持完全水平的姿态在水平方向上不产生动力,因此不能抵消气流,飞机会随风缓慢漂移,用户需要手动控制姿态角的大小和方向来抵消气流的影响。这就是“姿态模式”,姿态模式仅需要IMU即可正常工作,对传感器要求极低,不容易受地磁、卫星信号和光线的影响,能在更复杂的环境下飞行,但需要飞手手动实时修正,对飞手操控水平要求较高。老司机会利用姿态模式带来的惯性移动实现丝滑的运镜。
在定位模式(下称P模式)下,飞机的控制机制是在飞控自我稳定的基础上叠加用户输入。说人话就是你在遥控器上的每一次打杆,都不是直接控制飞机姿态,控制的是过了一遍飞控之后叠加出来的空间速度,飞控的权限高于用户。因此你感觉P模式的无人机操控非常简单,有手就会,用脚都能飞。

但是,在P模式下,其中一个传感器出问题,都有可能带来严重后果。
指南针被干扰或状态异常,会向飞控提供错误的绝对航向数据,飞控无法分辨数据的真假,仍然会按照这个错误的数据去修正姿态试图抵消位置的偏移,但GNSS给出的偏移量不仅不会减少,还会不断加大,于是飞控会越来越努力地试图消除位置的偏移,修正的力度和姿态会越来越大,但仍旧无法压制不断增大的位置偏差,最终姿态控制发散,飞机自然就开始放飞自我,不受控地一边翻滚一边自旋,最终炸机。为了避免这种情况出现,老司机在发现指南针异常后,会立即切入姿态模式或全手动模式救机。现在的飞控探测到指南针模值超出安全范围,也会自动关闭指南针,此时飞控没有了指南针帮助转换坐标系,自然也就无法定位悬停,强制进入姿态模式,以确保飞行姿态不会失控,用户此时可以手动控制飞机继续执行任务或返航。
气压计和视觉测高传感器损坏或数据异常,飞机将无法感知自己的真实高度,甚至会根据错乱的传感器数据开始胡乱修正油门。上面说到,P模式是在飞控自稳定的基础上叠加用户输入,自稳定随时可以覆盖掉用户打杆操作。结果是飞机不受控地越飞越高或越飞越低或完全无法上升下降,最终导致飞机坠毁。
GNSS依靠卫星发射的导航电文信号和时间码计算自己的位置。在狭窄的空间,卫星信号很容易被墙体各种反射,导致飞机接收到的信号时序和卫星方位出错,计算的位置与实际产生不断变化的随机偏差,飞控会认为自己的位置偏了而去强行修正自己的位置。用户在这个时候就会感觉到飞行过程中有一种强大而无形的力量在不停地抢夺自己的摇杆,飞机变得极难控制,甚至自己往墙上撞。

图中的环境就是典型的容易导致GNSS定位异常的环境,此环境下必须使用姿态模式才能正常操控飞机。在运动物体(如车、船)表面起降,同样也会碰到这个问题,必须使用姿态模式才能解决,否则会因为地速校正导致事故发生。

随着机器视觉定位技术的不断进步,我们在现在的消费级无人机身上已经很难看见姿态模式的踪影。在大疆精灵和悟系列的遥控器上,你还能找到手动进入姿态模式的开关,体验一下飞机完全操控在自己手里的感觉,也能在复杂环境下直接作业。

但是到了御系列机型身上,姿态模式入口被彻底封死,除了因为定位失效或指南针干扰自动进入的姿态模式外,用户无法自行启用姿态模式。无论是普通控还是带屏控,均没有姿态模式档位。用户要想体验一把姿态模式,必须找一个没有GPS的环境,把所有视觉探头用黑胶布贴上,或者通过非官方方式魔改飞控参数才行。

大多数情况下,用户不会感觉到缺失了姿态模式档位带来的体验变化。大疆也对自己的空间感知技术极度自信,从第一代御Pro,到后来推出的御Air、御2、御Air2/2S和御3,清一色地没有给用户留下任何手动进入姿态模式的入口。
作为一名在各种环境下飞行过的老飞手,笔者也曾多次向大疆提议为御系列增加手动姿态模式的入口,以实现在特殊环境下对飞行姿态的完全控制确保飞行安全,也曾多次和大疆沟通的过程中发出警告:如果任由飞控主导飞行姿态控制而完全不给用户超控的权限,将导致类似波音737Max8传感器失灵,飞行员无法越过飞控控制姿态而坠机那样的严重后果。但大疆置若罔闻,丝毫没有给消费级的御系列设计姿态模式档位的意思。
下面用一起最近发生的坠机案例讲一下手动姿态模式的必要性。

飞手操纵御3起飞后约4分41秒,准备做一个前进运镜时发现飞机有向左偏移趋势,即右手向右打杆进行修正(美国手)。如下图所示
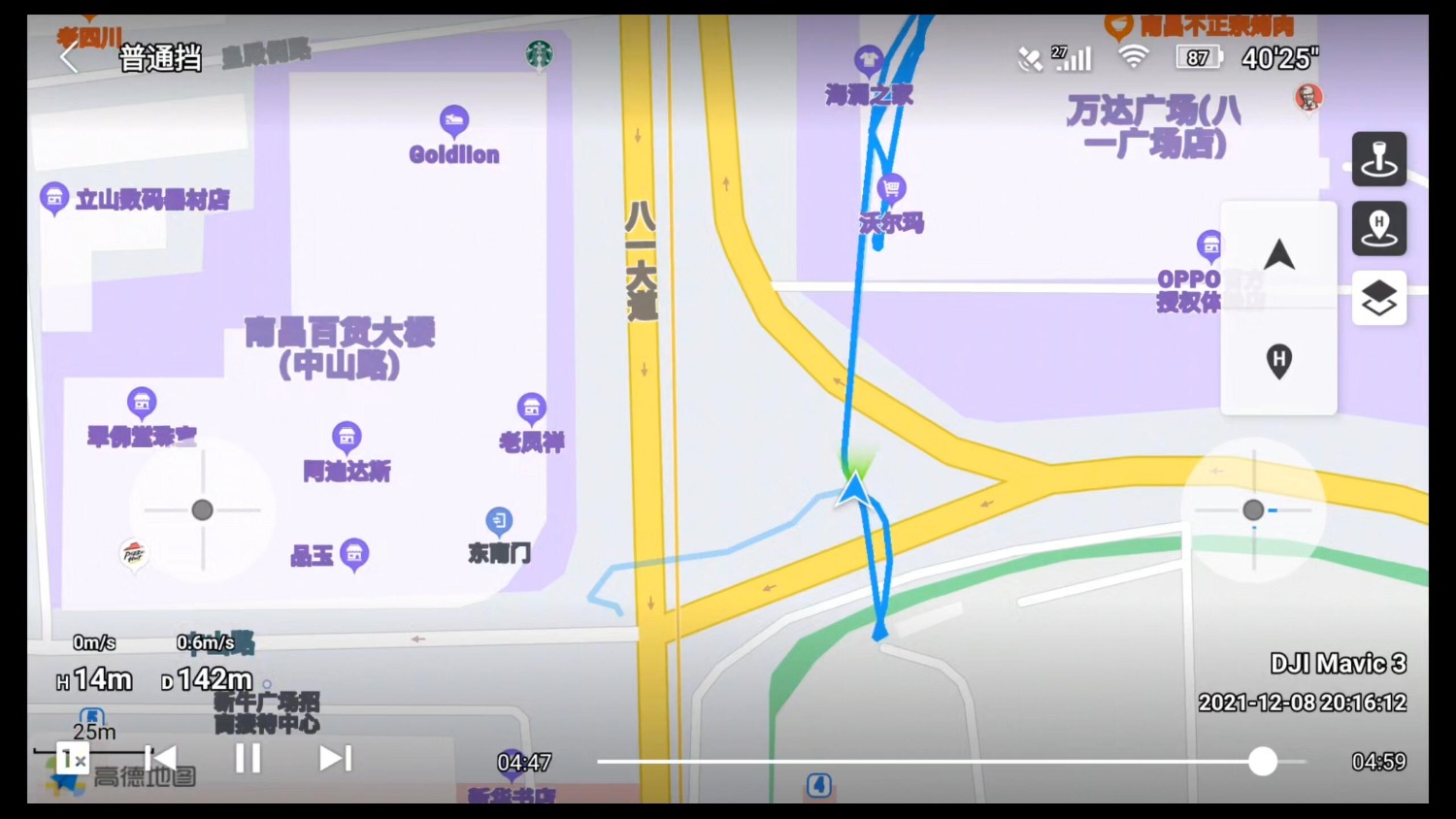
但飞机向左平移速度越来越快,且未发现向右推副翼杆产生作用,飞手加大杆量继续尝试修正,飞机没有反应。飞行记录如图所示。
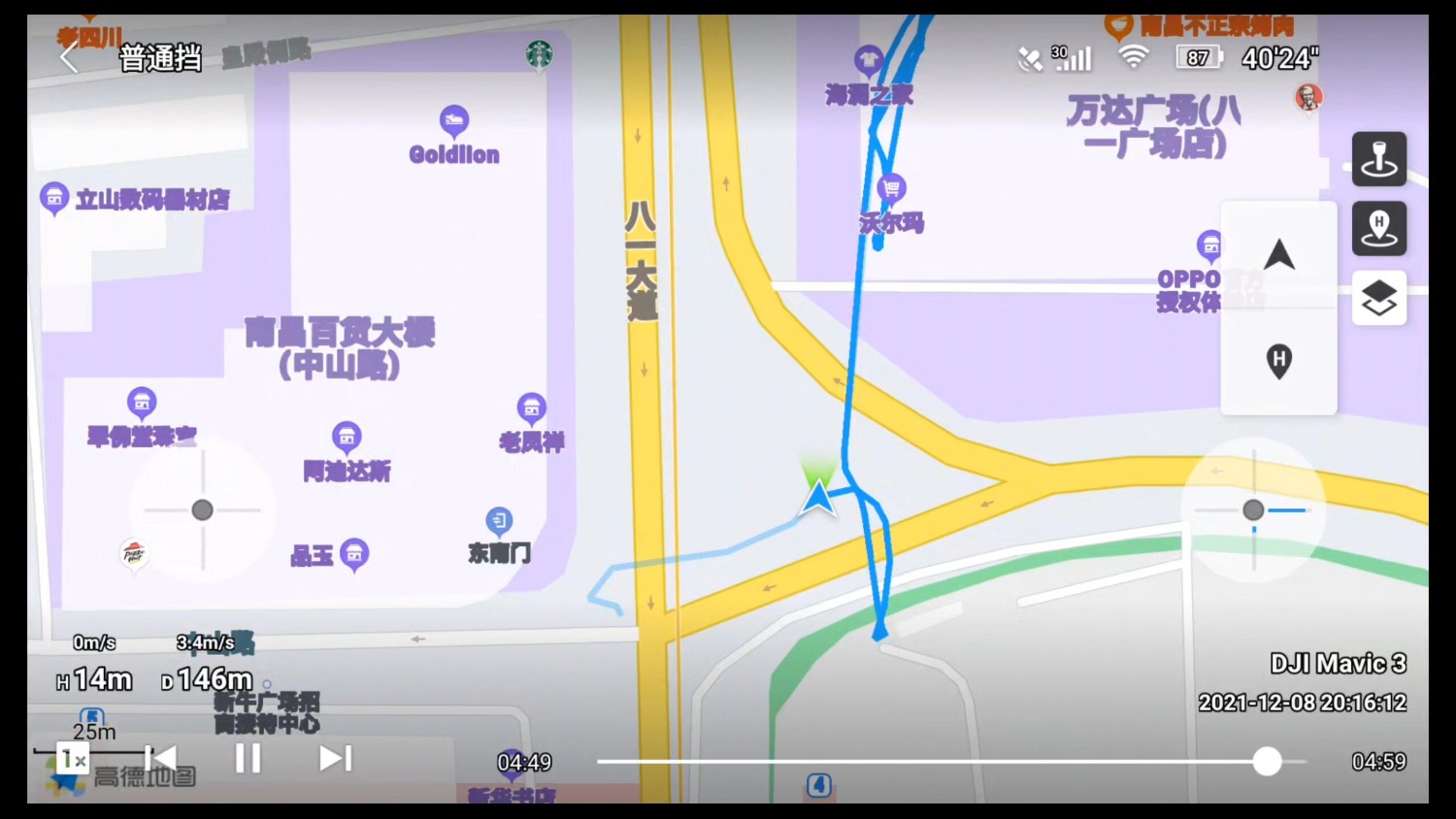
随后飞机开始自行顺时针自旋约90°并开始高速后退,飞手遂立即右手向前大幅度推杆进行修正并同时左手向上推杆升高高度,但飞机仍旧毫无反应继续朝先前的方向漂移。此时GPS卫星数正常,达到20-30星。

眼看飞机即将撞楼,飞手继续保持100%杆量全力反向打舵,试图救回飞机,但飞机对飞手的指令仍旧没有响应。

最终,飞机撞楼坠毁。飞手发现飞机开始自行偏离航线到坠毁耗时约9秒,在这9秒期间,飞手拼尽全力试图操控飞机,但仍然没能阻止坠机事故发生。
事故发生后,笔者对事故原因大致分析了一下:由于御3只能处于P模式下飞行,飞手的所有操作都是基于飞控自稳定基础上的叠加输入。当GNSS工作异常,给出了错误数据,或GNSS正常但飞控处理数据过程出错,飞机会进行错误的地速校正,甚至越过用户的权限,导致飞机出现不正常的机动并且用户无法控制。本案例中飞机全程GPS信号良好,但仍出现高速漂移且不响应用户操作,高度提示飞控地速校正错误,导致飞机碰撞坠毁。售后进行数据分析若发现地速和陀螺仪姿态与用户打杆方向始终相反即可确认。如果能及时切入姿态模式,断开GNSS,用户即可恢复控制权并避免事故发生。
大疆售后在分析飞行数据后给出的定责结果是“水平速度异常导致坠毁”,用户无责任,与笔者的判断相符。大疆日前也推出了新固件修复这一致命问题。
此案例再一次提醒我们,人类操作员仍应当拥有无人机的最高控制权限,即使消费级无人机的环境感知能力再强,也无法保证100%不会出错,留一个姿态模式入口,是给飞机留下最后的救命稻草。
一个可行的解决方式
大疆给御系列的遥控器并没有留下硬件上可进入姿态模式的档位,但仍然有补救的机会。首次设置可以在飞控高级设置中留下“启用姿态模式”的选项,打开之后APP弹出功能说明和警示语,用户二次确认后功能正式开启,之后用户在需要时可直接按住Fn(御2普通控和所有带屏控则是C1)不放,并将飞行模式开关推入S档位,即可进入姿态模式。若要退出姿态模式,直接将模式开关推回P或者C档位即可。或者,菜单设置直接将T档位替换为姿态模式也行,M300就这样干的。
不知道大疆会不会有所行动。
——By OsitaLV
航拍无人机
DJI Mavic
发布于2021-12-13
浏览8.0k
9
15
24
24 条评论
最热
最新
最早
说说你的想法,让评论更有深度~
查看更多评论