rs4二次开发求助
djiuser_x1xxIwRCIw9z
我想用DJI R SDK二次开发用电脑控制RS4云台,按照官方https://bbs.dji.com/pro/detail?tid=296556方案来做遇到了一些问题求解。
1,情况介绍
我买的是其他种类不是官方视频里的CAN盒但是用cantest软件连接云台可以接收报文,所以CAN盒应该是好的。然后直接运行RS2的demo是不行的,连不上这个CAN盒,所以我自己在zlg官网找了个能连接这个CAN盒的代码。于是我仿照RS2的demo用zlgcan写了个demo试着控制云台。结果demo从接收数据来看是能正常运行的,但我尝试发送控制数据,云台没反应。
所以有以下问题需要请教和帮忙解决。
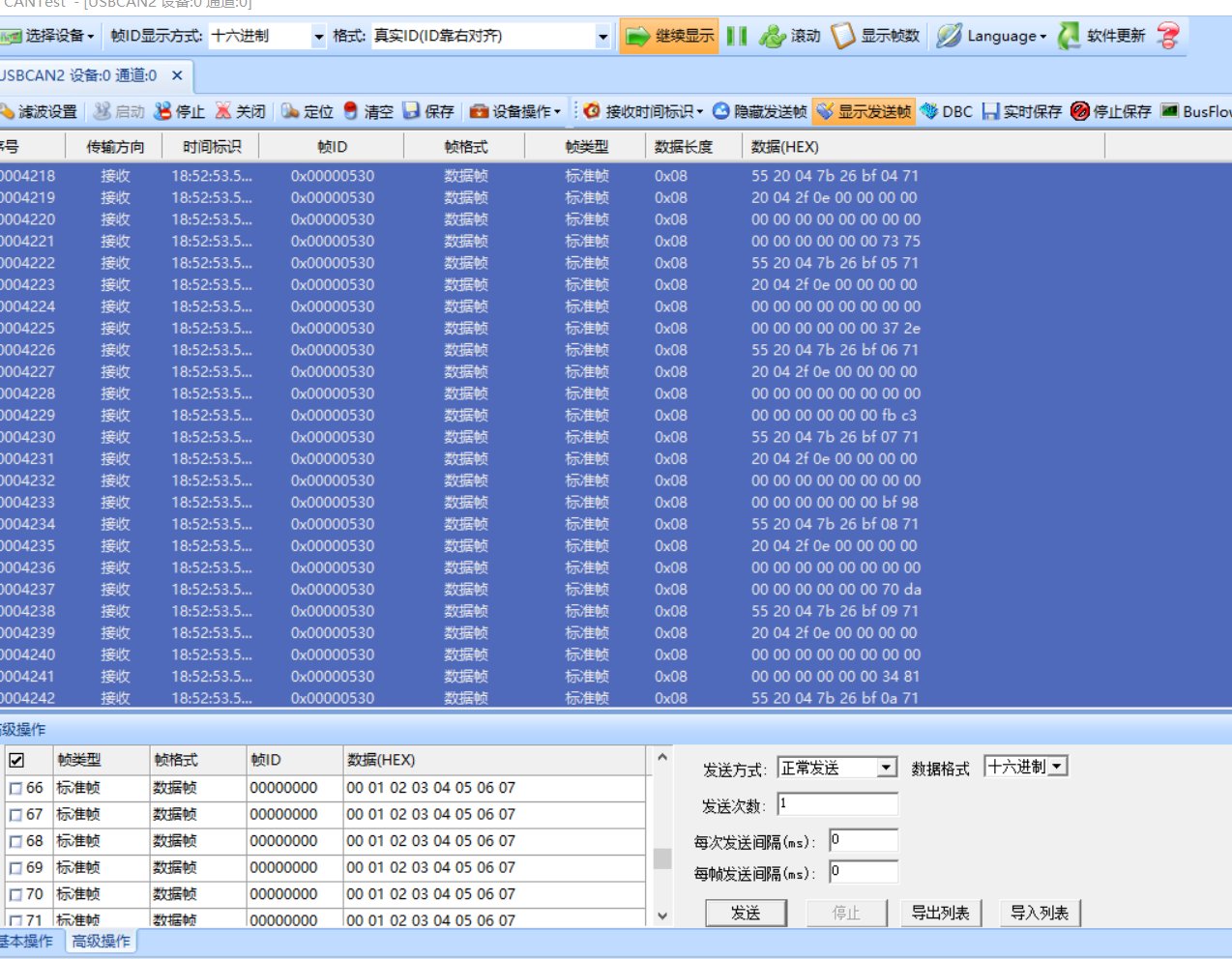
图1,接收的报文

图2,用的CAN盒
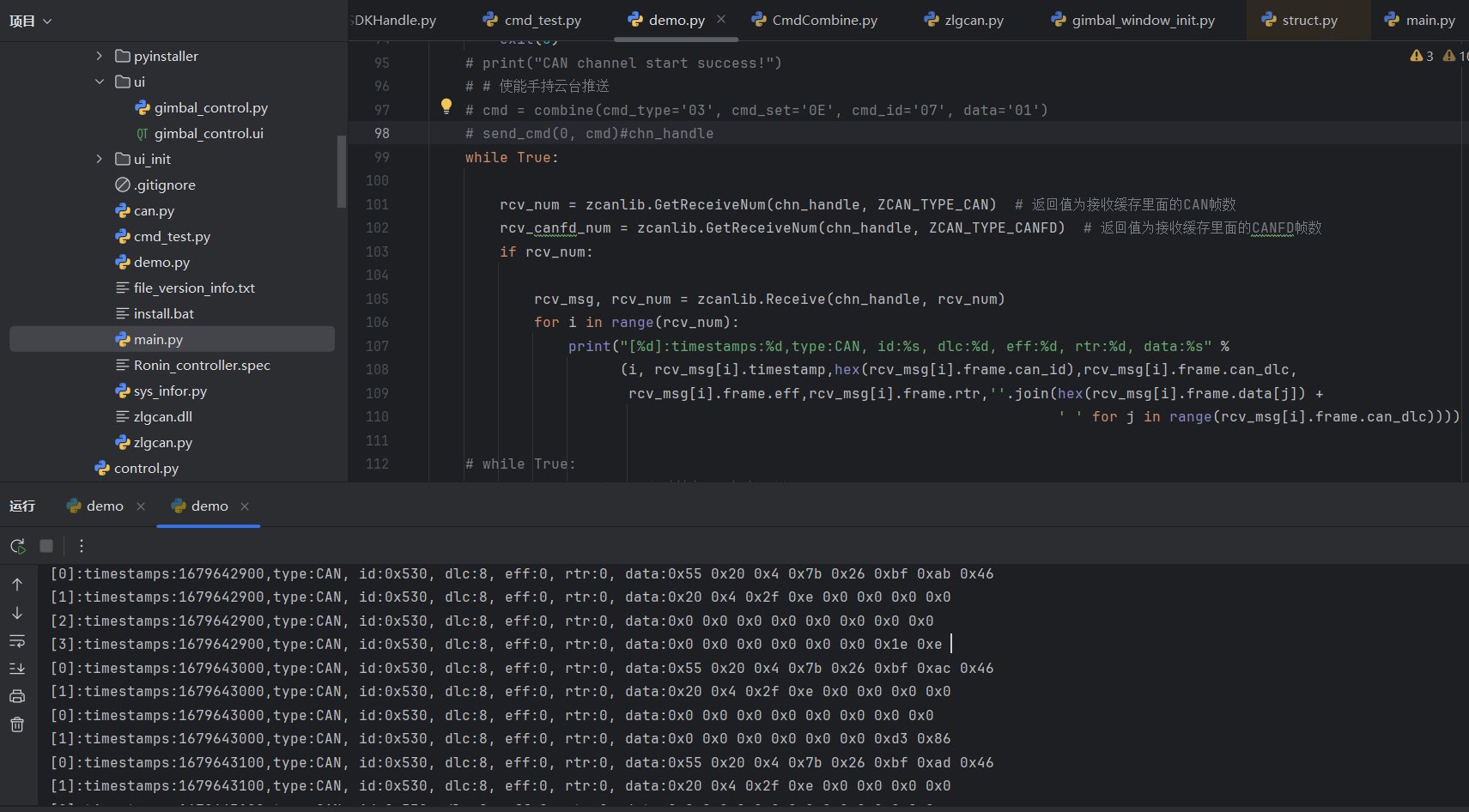
图3,demo数据接收运行
2,DJI_R_SDK_Protocol_and_User_Interface_CHS_v2.5文档是不是过时不适用在RS4上?有没有RS4可用的文档?
因为我看文档规定帧头固定为0xAA,而我接收的报文开头都是0x55开始。而且接受帧id是530或426,与rs2demo规定的223,222不一样。
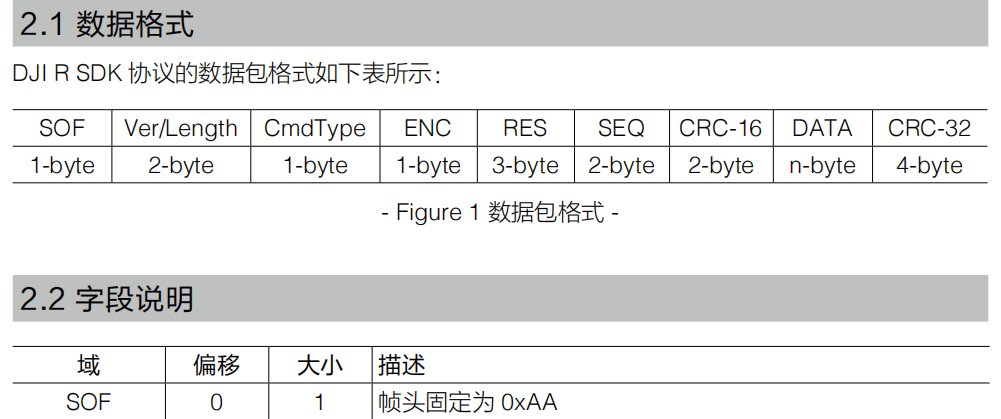
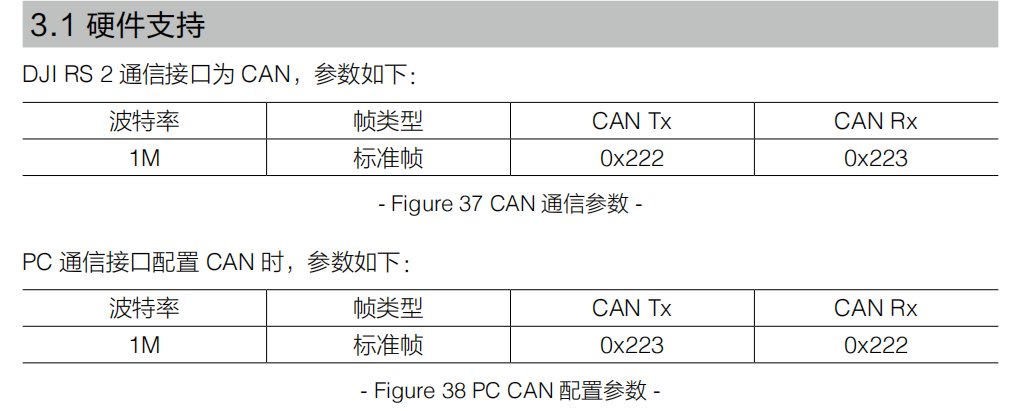
图4,文档部分
3,数据发送方式是不是我理解的方式?
我理解的方式是一个数据包用四个can帧传输。比如数据包“AA:1a:00:03:00:00:00:00:03:00:7A:1E:0E:00:64:00:C8:00:2C:01:01:14:94:DF:5D:8B”
前八个“AA:1a:00:03:00:00:00:00”放在send_buf[0].Data里,后八个在send_buf[1].Data,之后剩下5D:8B的放最后send_buf[3].Data[0,1]里,一并发送。
但我在图1,接收的报文里只有第4帧最后两个有数据,是不是意味着RS4对余下数据对齐方
式发生变化了,改放在最后两位6,7里?
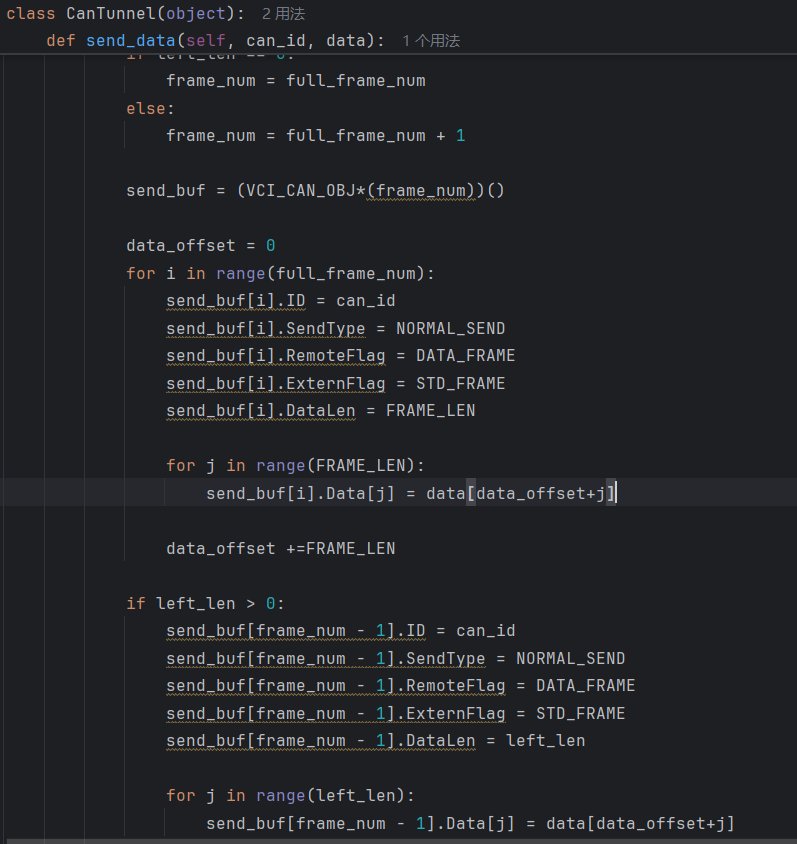
图5,sdk demo 发送数据代码
4,如果这个方案现在还不能在rs4上实现,那能不能有蓝牙的sdk像手机App一样用蓝牙控制云台?
手持摄影
Ronin
发布于2024-12-10
浏览318
17
17 条评论
最热
最新
最早
说说你的想法,让评论更有深度~
查看更多评论
