prolqfx


已累计飞行 9141756 米
一直以来,大家都熟悉了经典的传统返航逻辑,即垂直爬升到返航高度——直线飞回——垂直降落。不过很多时候这也确实算不上最佳路径,返航高度如果设置不妥,太低了容易撞到障碍,太高了又会无意义地爬升,白白费电,甚至可能导致飞机在返航中途就低电量降落导致丢机,所以我个人一般也不会用自动返航,都是手动飞回,即使遭遇丢信号自动返航,也会在收到信号后第一时间切回手动飞行,并且采用俯冲的方式边返航边降低高度,大大节约电量。
随着技术的发展,从air2开始大疆引入了全新的AI,全面提升了智能跟随、避障、环绕等智能飞行性能,当时也第一次出现了“智能返航”概念,其中就包括部分条件下的原路径返航,以及俯冲返航等,不过因为避障传感器的局限,这个功能最后又被屏蔽了。直到最新的御3,在最新的全向避障系统加持下,智能返航功能终于重出江湖,而且成为了默认返航逻辑,可见大疆对其是信心满满。
那么这个功能到底有多强,好不好用呢?下面是我分几种情况进行的实测(均为环境光足够亮,避障可正常工作的情况下测试。因为根据大疆的文档,在避障不工作时智能返航是不生效的,会自动采用传统返航逻辑,也就没必要测试了)。
下面是测试具体内容:

测试过程我做成了视频,建议看视频更直观。
完整测试视频
1、 一般障碍遮挡(前方)/关闭遥控器模拟失控
操作飞机低空飞行到树丛后面,然后开始水平环绕,飞到树背后时关闭遥控器,模拟绕楼飞行时信号丢失的情况。和传统的返航方式不同,御3此时会识别到前方障碍物,然后以一个不是很高,又留有足够冗余的高度从障碍物上方飞过,然后直线返回,并不会左右绕行。飞机不会垂直爬升到设定的返航高度,估计它能根据场景识别,自动计算合适的高度(在我测试的环境下是15米左右),降落也是斜线降落到10米左右再垂直落地,全程飞行高度值是一个曲线,很自然。
2、 复杂障碍遮挡(上下左右和前方)/关闭遥控器模拟失控
首先说明,我是先关掉避障,然后才能把飞机飞到上下左右都是树枝的地方,正常情况下是不会陷于此种境地的。因为离障碍物很近了(甚至都割草了),老款的飞机在此环境下会不知所措,只能悬停,但御3仍然正确识别到了整体环境,果断地自动掉头,飞出障碍区域后立即再次调头,同时爬升,斜线飞过树木之后返航。过程流畅,行云流水,如同老司机手动打杆飞行一般。U1S1,大疆这套高级智能返航算法还是很牛的!

3、 一般障碍遮挡(前方)/手动触发返航/手动关掉避障
和第一种情况几乎一样,同样是斜线上升,越过树丛直线返回,然后斜线下降,垂直降落,只是飞行高度和之前略有不同。说明手动关掉避障对返航时避障没有任何影响(和前代机型一致)。
4、 无障碍遮挡/手动触发返航/中等距离
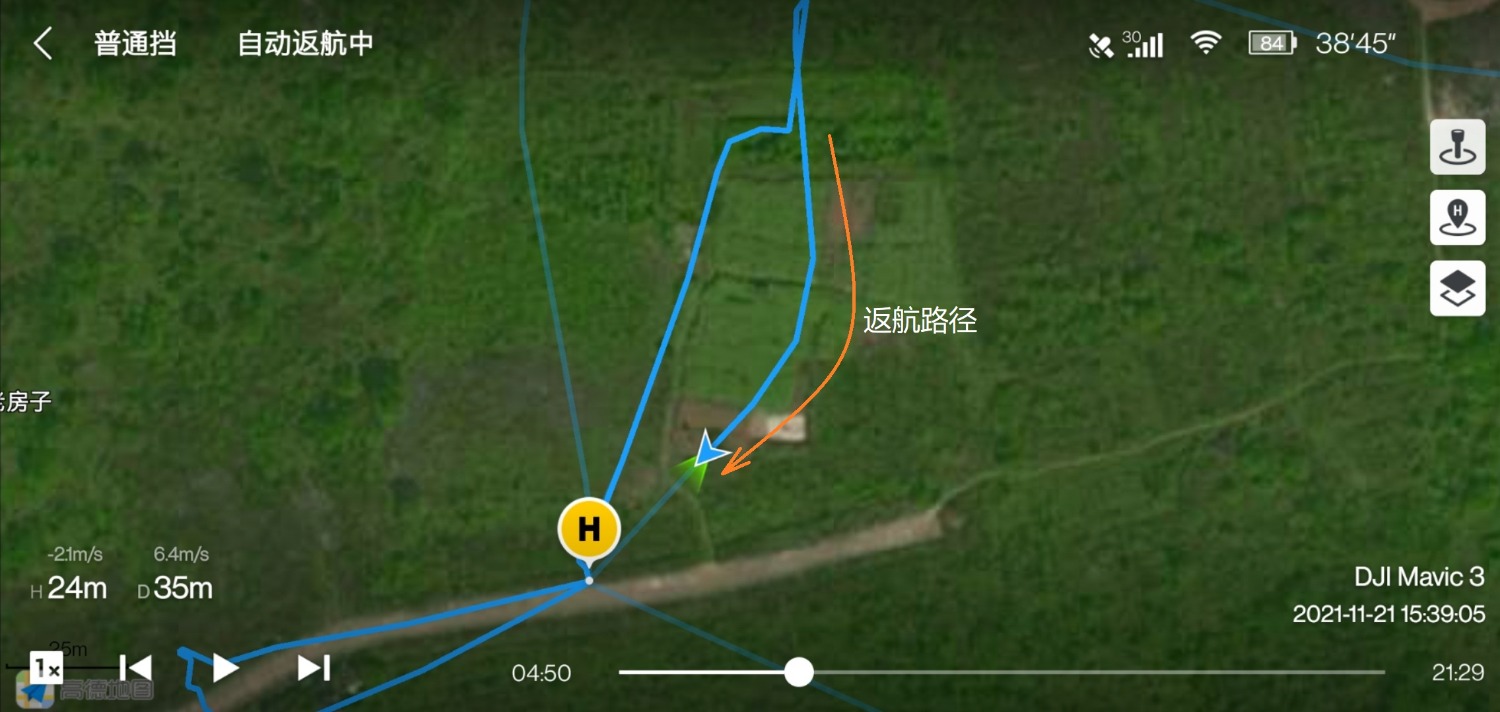
操作飞机飞到125米远,飞机高度为35米(设定返航高度56米),手动按下遥控器返航按钮,飞机调转机头后只微微爬升了1米左右就开始返航了,应该是自动识别到前方没有障碍物,所以并未多此一举地爬升到56米,这很好,但这次返航它并未直线回来,而是走了一个曲线,但整个场地都很空旷,没有任何高于10米的障碍,这就有点让人摸不着头脑,如图所示:
5、 无障碍遮挡/手动触发返航/远距离
飞行到375米高,1公里多,然后点击返航按钮,这种情况下和传统模式基本类似,飞机会直线飞回,但会在合适的时候开始同时下降高度,俯冲降落以节约电量。
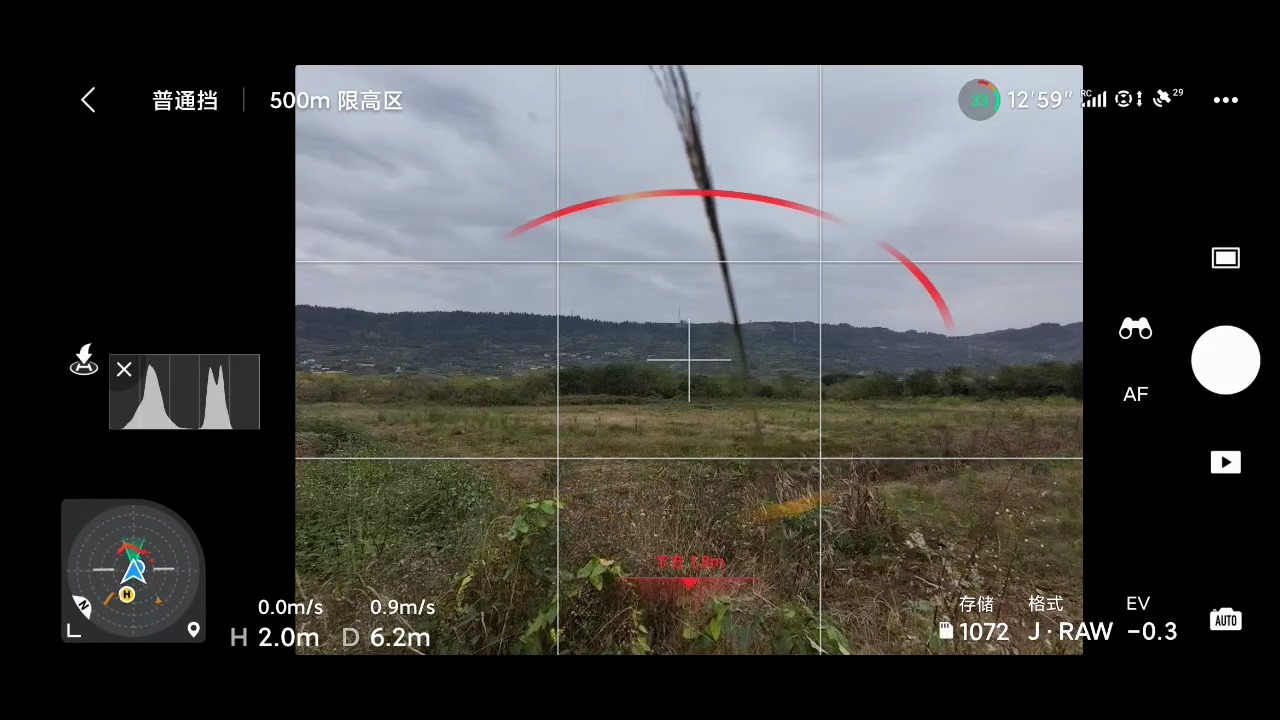
6、 细小障碍物是否能避障
显而易见,避障系统在新的智能返航逻辑里占据举足轻重的地位,可以说飞机能否安全的返回,几乎完全取决于避障系统是否能100%正常工作……然而问题就在于:不能!比如下面的简单测试,飞机无法检测到前面的芦苇杆,向前飞行时直接削过去了……如果换成电线之类的,很难说不会炸机。
结论:
1、 Mavic3的高级智能返航名副其实
这套算法能果断、有效地规避各种复杂障碍,选择最优路径返航,并且全程运行流畅,让人叹服,是名副其实的“智能”。当然,这建立在避障系统正常发挥作用的前提下。
2、偶尔返航路线比较迷惑
类似测试4中返航时莫名走曲线的情况,偶然会遇到,不过我觉得这应该不是bug,而是算法基于某种考虑特意选着的路线,希望以后能搞明白原因,哈哈。
3、返航安全性完全一来视觉避障,特殊情况下智能返航逻辑可能有安全隐患
虽然现有全向鱼眼+超广角避障系统确实非常厉害,AI加持后很聪明,检测距离、范围、精准度都比前代机型有大幅度提升,但和所有机器视觉传感器一样,仍然具有局限性,尤其是对于电线、树枝、玻璃幕墙等,哪怕是最新的避障算法仍然无能为力。此时如果丢失信号,飞机全凭视觉避障感知飞回,可能会撞上这些无法检测到的障碍物,导致炸机或飞丢,有一定安全隐患。
写在最后:
希望大疆仔细评估,最好把传统返航模式重新开放,允许用户选择使用,而不是强行使用高级智能返航功能。另外,需要在APP里对高级智能返航的特性进行提示(仅仅写进说明书或教程视频是不够的,很多人压根不会看),让用户对飞机可能的行为有心理预判,尽可能减少因为智能系统失误导致的炸机。
航拍无人机
DJI Mavic
发布于2021-11-22
浏览7.9k
5
2
27
27 条评论
最热
最新
最早
说说你的想法,让评论更有深度~
查看更多评论






