我我我勒个去

已累计飞行 252264 米
小悟进入运输模式机臂停止运动的点是靠光流模块感知与地面距离的来判定的。 (大家可以试下进入运输模式的瞬间手堵着光流模块,小悟会立刻判定已进入运输模式)。
正是因为这个悟pro或raw升高脚架后进入运输模式,超声波测量地面距离还是按照1.0的参数来。造成进入运输模式后机臂停止运动时机臂已经上扬了一定角度,直接导致悟pro放入箱子后光流模块和前减震球支撑着机身而机臂不受力(本应由机臂受力来保护机身)大大削弱了箱子对悟的保护作用看下图 如果不慎摔到箱子减震板就危险了。
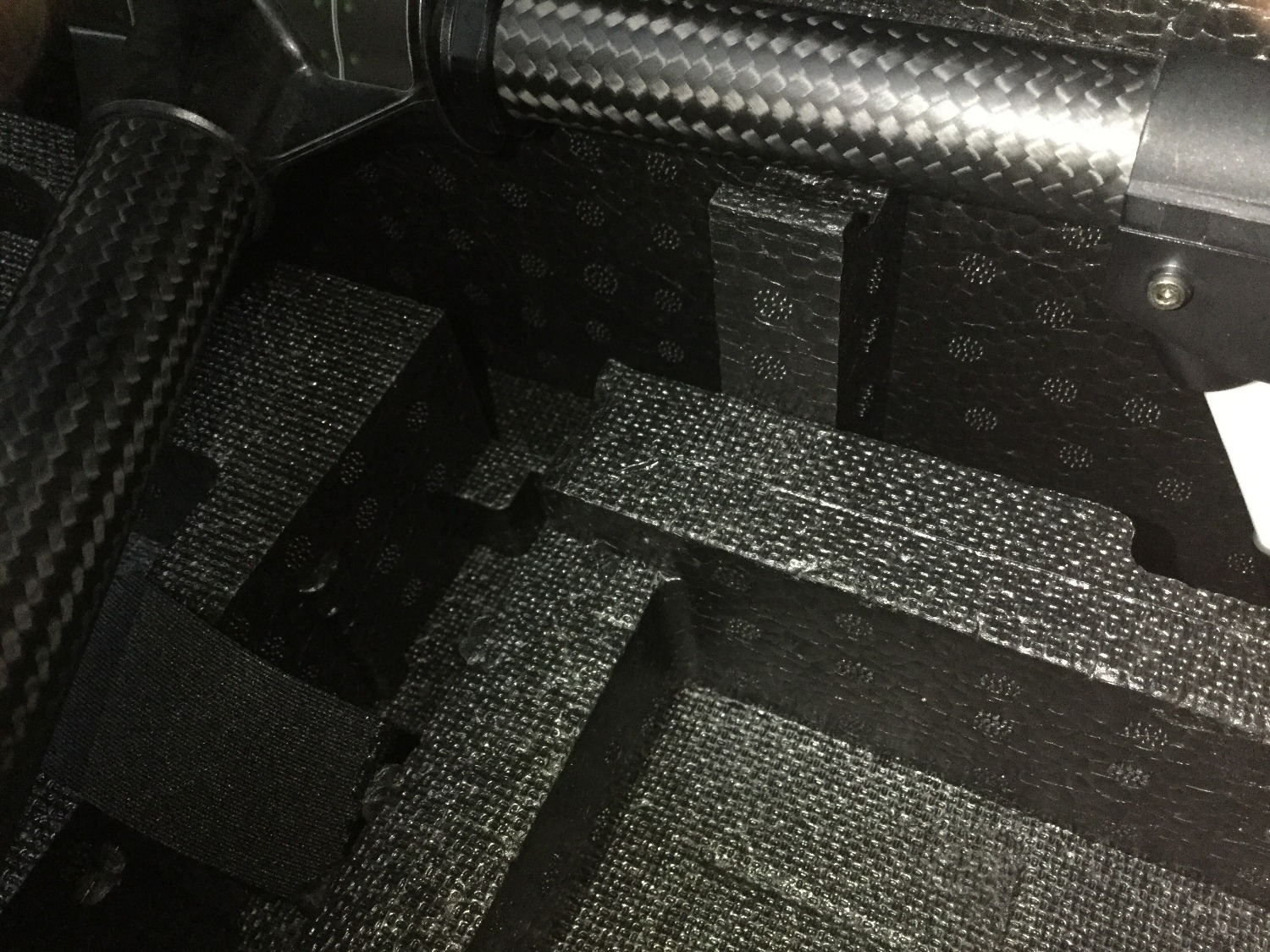

建议dji出新固件时修复这一bug! 细节之处才能看出一个公司研发产品时的用心程度!!!
注:进入运输模式时机身在光滑的地板上 光线充足
发布于2016-10-28
浏览1.7k
相关分类
航拍无人机
Inspire
1
0
16
0
16 条评论
最新
最早
快来评论吧




查看更多评论