一木了然

已累计飞行 0 米
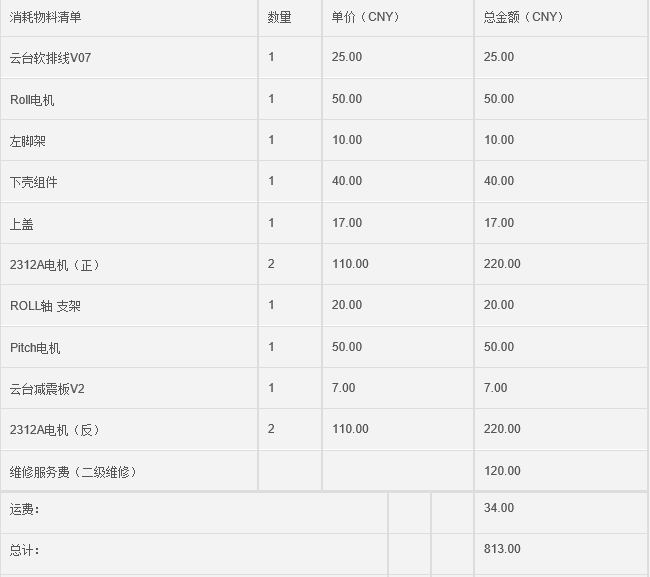
好贵啊
发布于2017-7-13
浏览794
相关分类
咨询
售后服务
0
0
6
0
6 条评论
最新
最早
快来评论吧
 找到设置的地方了
比较隐蔽
以前没注意到
多谢
找到设置的地方了
比较隐蔽
以前没注意到
多谢
已累计飞行 131755 米
脚架走线就是这样的;
您说的情况其实可以起飞后刷新返航点,以遥控器位置为返航点(是通过移动设备的GPS实现,所以要求移动设备有GPS),这时候返航点就是遥控器所在位置了
2017-7-19
已累计飞行 0 米
没有,因为我移动了,没有在原来的返航点上,所以希望有这种功能,能在遥控器可控的范围内,不要触发返航。
或者返航点能跟随遥控器也行。
另外,机器修已经回来了,不过,只有三只脚上有天线,剩下一只脚没有天线,不会影响遥控器信号么?
需要我自己怼一根线么?

2017-7-17
已累计飞行 0 米
嗯,返航高度是比飞行高度高。
不过还是有点建议,希望大疆能有所改进:
飞行器与遥控器之间的距离小于30m的范围内,说明飞行器是可控的,不需要启动自动返航,规则跟返航点30米范围内一样,优先级应该更高。
像我个人的习惯是,在电量充足的时候会让飞行器远处飞;电量不足的时候,我会在近距离遥控飞行器,这个时候不需要出发自动返航。
我想为了飞行更安全,而且能更享受飞行乐趣,跟我的想法相似的人应该有很多吧,毕竟还有点,还能飞。
2017-7-15
已累计飞行 131755 米
楼主,我看到您的寄回案例时描述了飞行器进入自动返航,上升时发生了撞击,您当时设定的返航高度是不是高于飞行高度呢?如果是这样,飞行器会先上升再返航,您可以在用户手册看看返航逻辑
2017-7-14
暂无更多评论